| etc | ||
| .gitignore | ||
| 2022-10-25-11-33-40.png | ||
| 2022-10-25-11-45-26.png | ||
| 2022-10-25-11-46-04.png | ||
| 2022-10-26-21-47-29.png | ||
| 2022-10-26-21-47-49.png | ||
| 2022-10-26-21-48-00.png | ||
| 2022-10-26-21-53-13.png | ||
| 2022-10-26-22-06-19.png | ||
| 2022-10-26-22-43-25.png | ||
| 2022-10-26-22-48-09.png | ||
| 2022-10-27-15-31-49.png | ||
| 2022-10-27-15-32-07.png | ||
| 2022-10-27-20-15-13.png | ||
| 2022-10-27-20-15-19.png | ||
| 2022-10-27-20-19-47.png | ||
| 2022-10-28-15-52-14.png | ||
| 2022-10-28-15-52-44.png | ||
| 2022-10-28-15-52-58.png | ||
| 2022-10-28-15-53-29.png | ||
| 2022-10-28-16-30-51.png | ||
| 2022-10-28-18-21-53.png | ||
| 2022-10-28-18-22-17.png | ||
| 2022-10-28-18-28-51.png | ||
| README.html | ||
| README.md | ||
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
!\[\]\(([^\)]*)\)
<center><img src="$1" width=400px></center>
Why are the drawings bad?
I draw them with a mouse
Etc
FIRST-PASS CHECKS
- Double check all are in the correct phase! Multiplications and divisions by
\sqrt{3}or3where necessary must be checked! Try annotating everything that does not have an associated phase. - Check conjugate in current.
\bar{S}=\bar{V}\bar{I}^* - Check transformer parameters are referred to the proper side
Y-\Delta transformation (Balanced case)
Z_\Delta=3Z_Y
Types of power factors (From ENSC2003)
Where \bar{S}=|\bar{S}|\angle\varphi:
\varphi = \arctan\left(\frac{Q}{P}\right) = \theta_v-\theta_i| Lagging | Leading | Unity | |
|---|---|---|---|
| Voltage | Current behind | Current ahead | In phase |
| Load type | Inductive | Capacitive | Resistive |
Q |
Q>0 |
Q<0 |
Q=0 |
\varphi |
\varphi>0° |
\varphi<0° |
\varphi=0° |
| PF [Load] | [0,1) |
[0,1) |
1 |
| PF [Source] | [0,-1) |
[0,-1) |
-1 |
Power types in induction motor
| Type | Description | Equivalent terms |
|---|---|---|
| Input power | Power into machine. V_T=V_{3\phi}, I_L=I_{3\phi} |
P_\text{in}, \sqrt{3}V_TI_L\cos(\theta) |
| Output power | Mechanical output power of the machine, excludes losses | P_\text{out}, P_\text{load} |
| Converted power | Total electrical power converted to mechanical power, includes useful power and mechanical losses inside machine | P_\text{conv}, P_\text{converted}, P_\text{mech}, P_\text{developed}, \tau_\text{mech}\times\omega_m |
| Airgap power | Power transmitted over airgap. | P_\text{AG}, \tau_\text{mech}\times\omega_s |
| Mechanical loss | Power lost to friction and windage | P_\text{mechanical loss}, P_\text{F\\\&W}, P_\text{friction and windage} |
| Core loss | Power lost in machine magnetic material due to hysteresis loss and eddy currents | P_\text{core} |
| Rotor copper loss | Due to resistance of rotor windings | P_r, P_\text{RCL} |
| Stator copper loss | Due to resistance of stator windings | P_s, P_\text{SCL} |
| Miscellaneous loss | Add 1% to losses to account for other unmeasured losses | P_\text{misc}, P_\text{stray} |
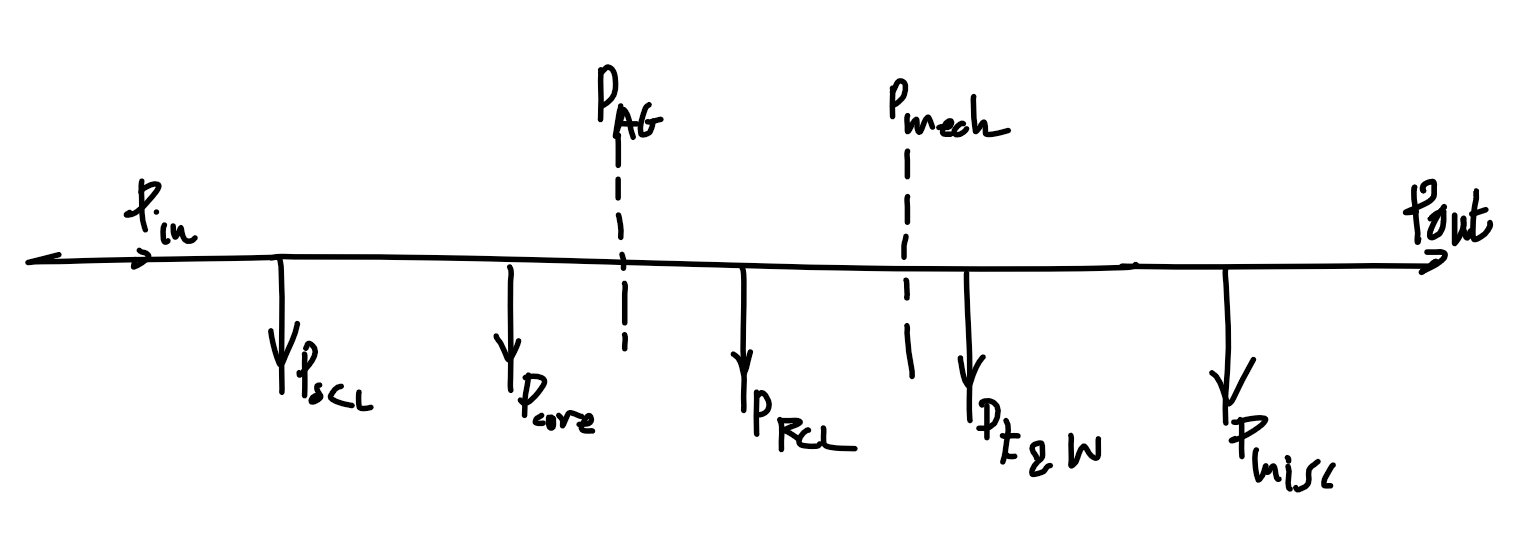
\begin{align}
P_\text{in}&=P_\text{SCL}+P_\text{RCL}+P_\text{core}+P_\text{F\\\&W}+P_\text{misc}+P_\text{out}\\
P_\text{AG}&=P_\text{RCL}+P_\text{F\\\&W}+P_\text{misc}+P_\text{out}\\
P_\text{mech}&=P_\text{F\\\&W}+P_\text{misc}+P_\text{out}
\end{align}
Note - assume loss is 0 if not mentioned!
| Type | Description | Symbols |
|---|---|---|
| Load torque, Shaft torque | Torque experienced by load after all losses | \tau_\text{load}, \tau_\text{shaft} |
3\phi induction motor
Etc.
-
Slip speed
N_\text{slip}=N_{s\text{ (sync)}}-N_r=sN_{s\text{ (sync)}} -
"1/4 of rated load" != "1/4 times full load"
- Means 1/4 of full load slip as it is in the linear region. Accounts for the minimum load.
-
Rated power stated in machine specification refers to the output power
P_\text{out}, and excludes all losses. -
Speed regulation using machine speed: $$\text{SR}=\frac{N_{r,\text{NL}}-N_{r,\text{FL}}}{N_{r,\text{FL}}}
Diagram
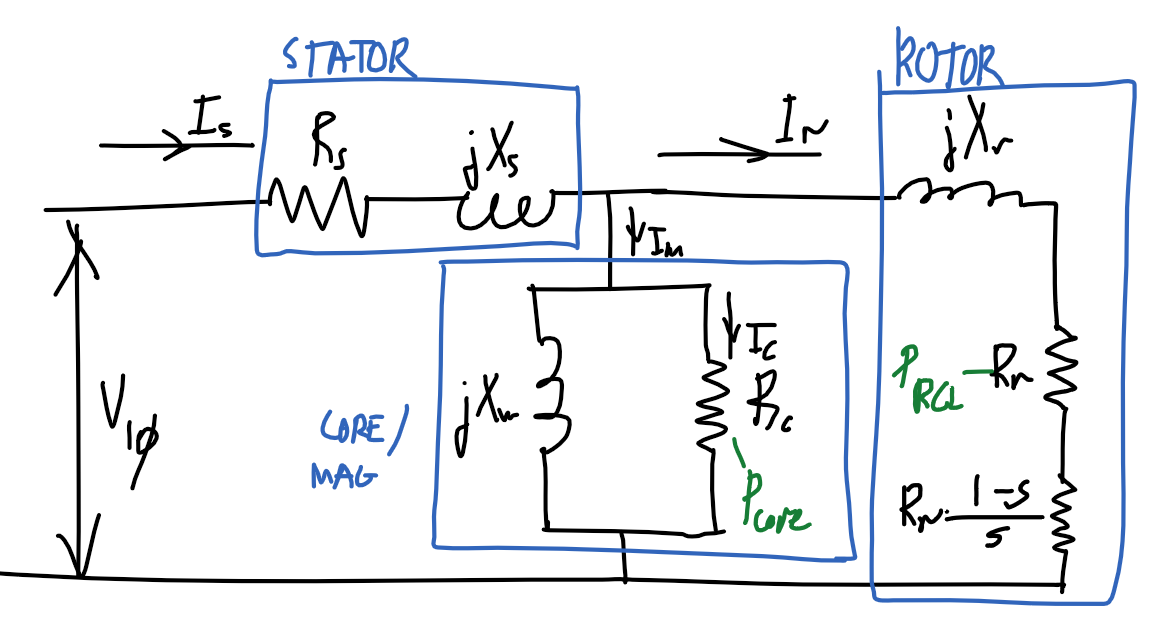
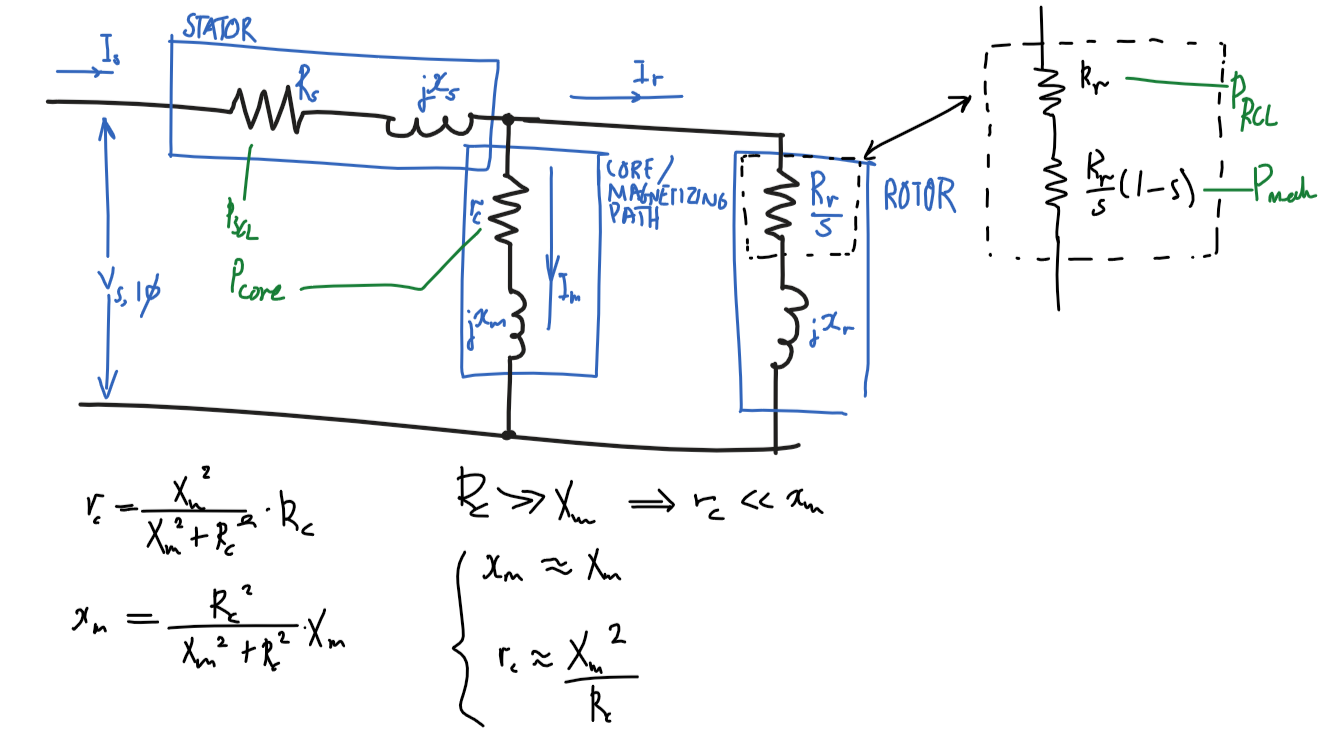
Equivalent model
Assumptions
x_m\approx X_mR_c\ggg X_m\Rightarrow r_c\lll x_mx_m=\frac{{R_c}^2}{{R_c}^2+{X_m}^2}X_m\approx\frac{\cancel{{R_c}^2}}{\cancel{{R_c}^2}}X_m=X_m
r_c\approx {X_m}^2/R_cR_c\ggg X_m\Rightarrow r_c\lll x_mr_c=\frac{{X_m}^2}{{R_c}^2+{X_m}^2}R_c\approx\frac{{X_m}^2}{{R_c}^2}R_c=\frac{{X_m}^2}{R_c}
Diagram
DC test
\Delta machine
R_s=\frac{3}{2}\cdot\frac{V_{\text{DC},3\phi}}{I_{\text{DC},3\phi}}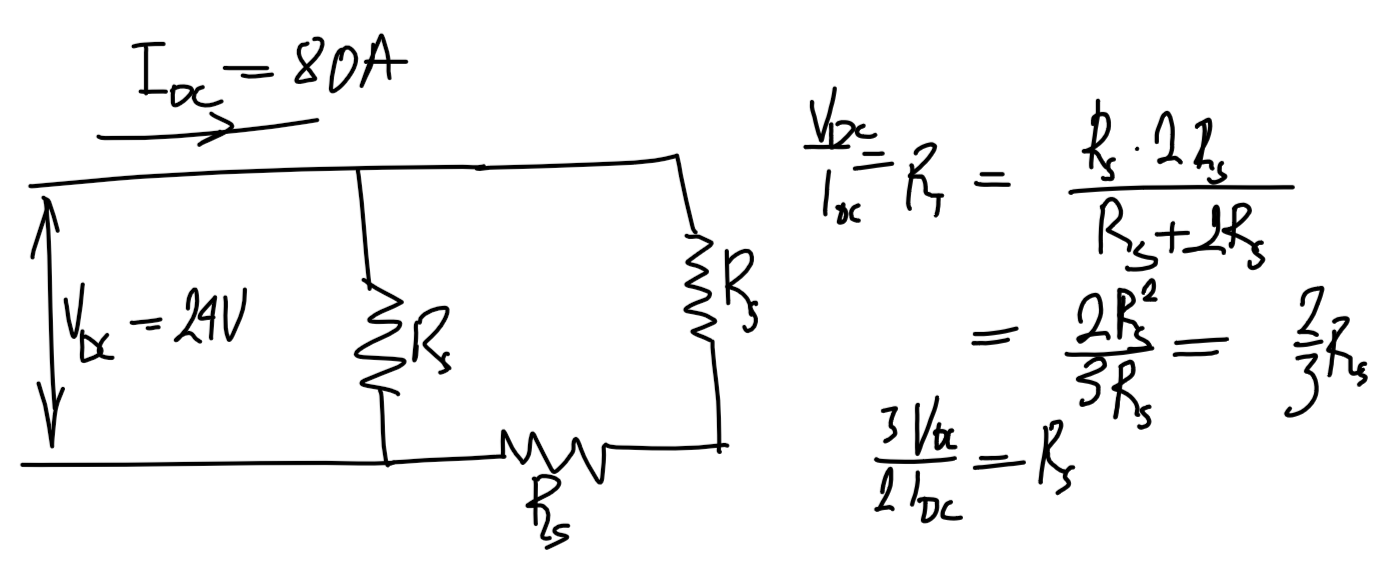
Y machine
R_s=\frac{1}{2}\cdot\frac{V_{\text{DC},3\phi}}{I_{\text{DC},3\phi}}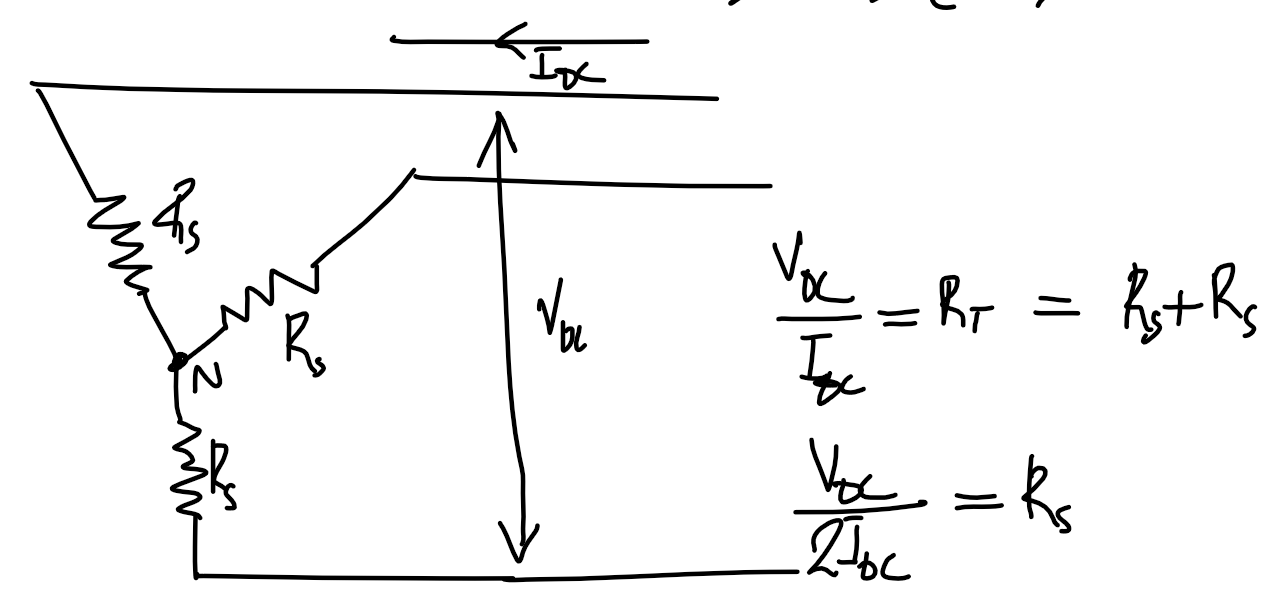
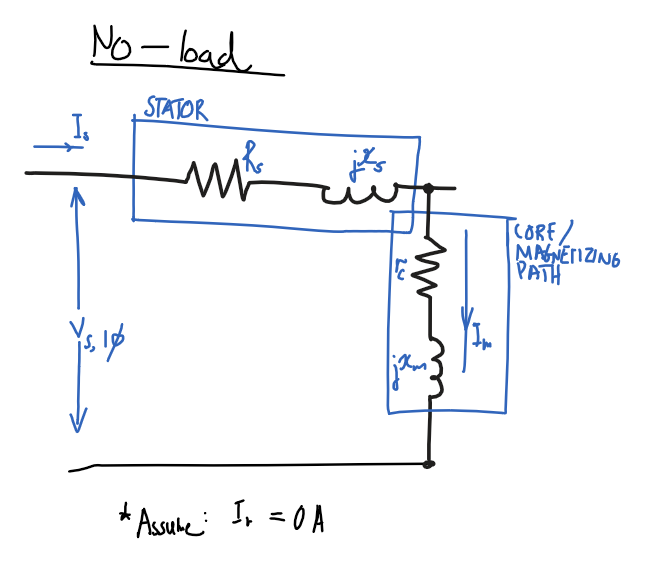
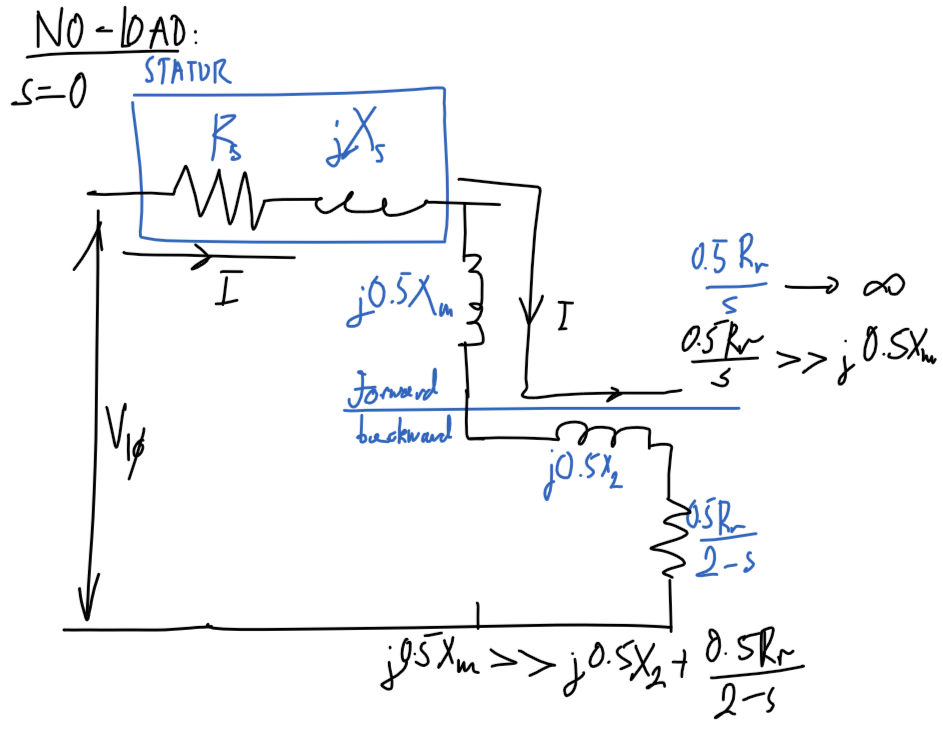
No-load test
Assumptions
P_\text{out}=0- No output power as no load.
R_r/s=\inftyandI_r=0- Infinite rotor resistance, ignore rotor path.
Diagram
Using assumptions, remove rotor part of circuit and only consider stator and magnetizing path.
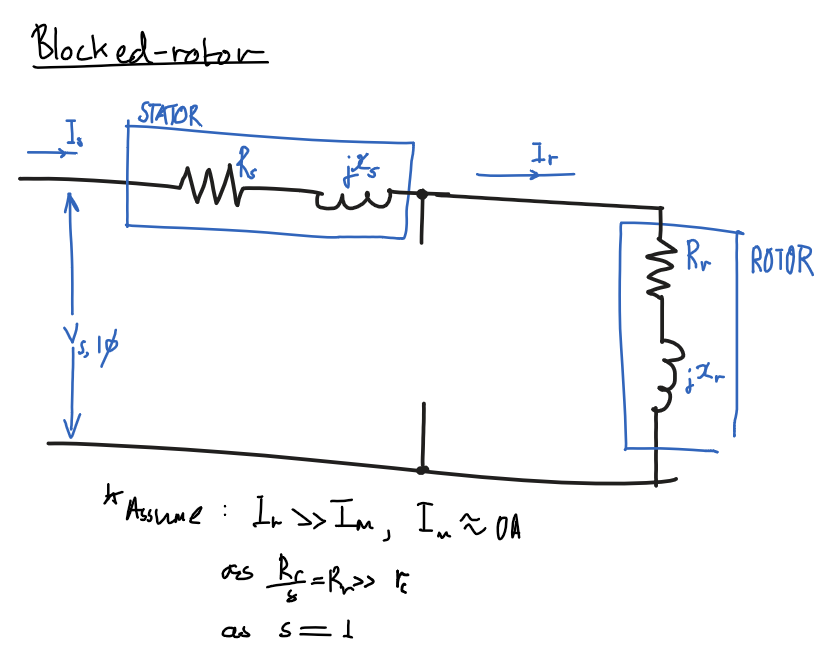
Blocked rotor test
Assumptions
- Ignore magnetizing path,
I_m=0I_r\ggg I_masR_r/s\ggg Z_m
R_r/s=R_r,s=1- Slip is
1as rotor is blocked.
- Slip is
x_s=x_r'- Same number of turns in stator and rotor
- and
x_r=f_0/f_\text{BL} \times x_r'- Note:
x_r'is the inductance atf_\text{BL}, the blocked rotor test frequency which is less than the nominal frequencyf_0
- Note:
Diagram
Ignore magnetizing path
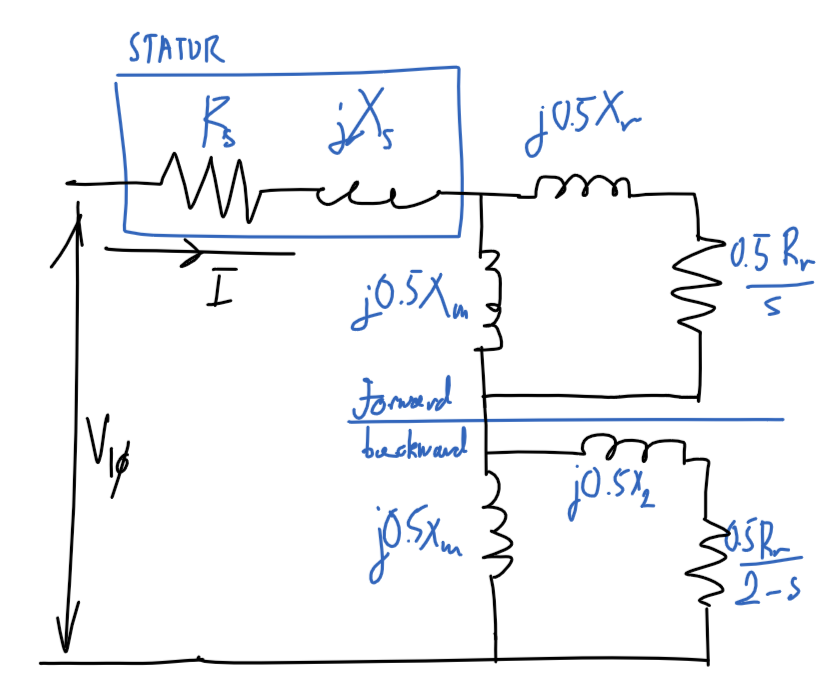
Single-phase induction motor
Diagram
Blocked-rotor
Diagram
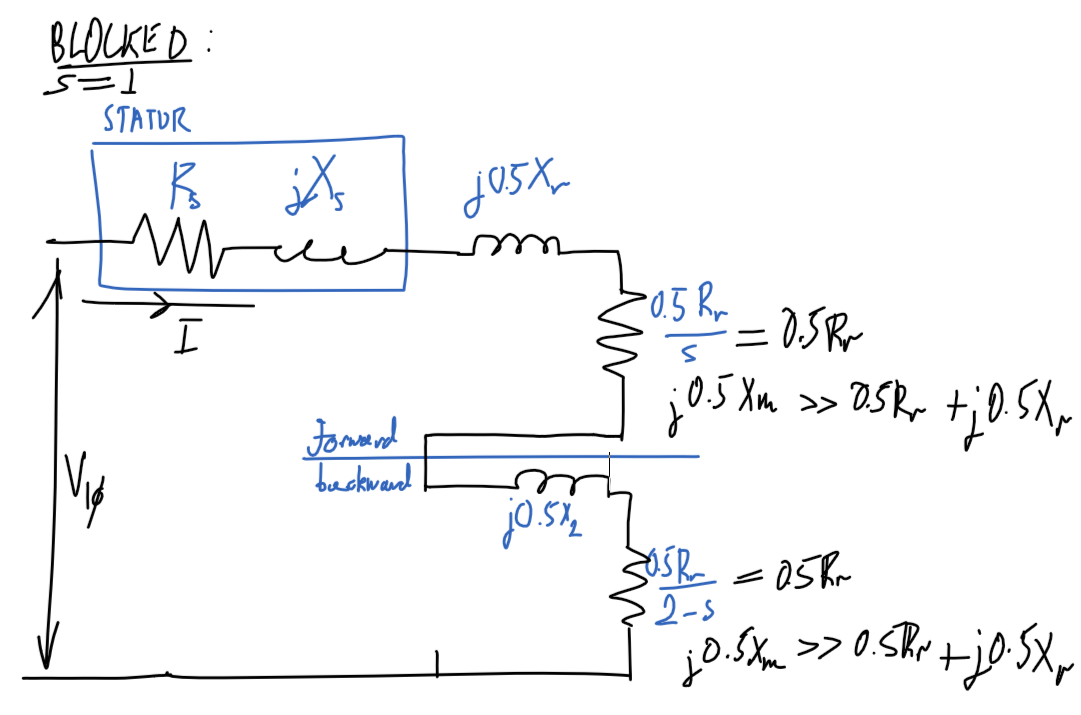
No-load
Diagram
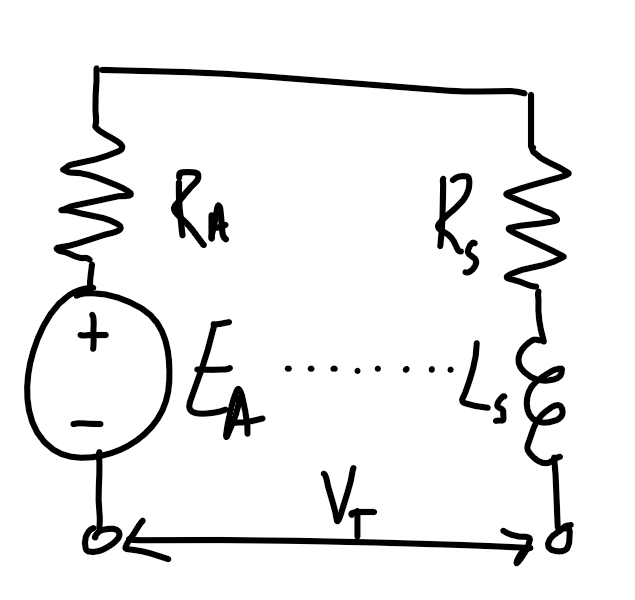
Synchronous machine
Etc
E_A=V_{1\phi}-I_A(R_A+j X_s)I_A=\text{CONJUGATE}\left(\frac{|S_{3\phi}|\angle\arccos(x)}{3V_{1\phi}}\right), \begin{cases}x=+\text{PF} && \text{lagging} \\ x=-\text{PF} && \text{leading}\end{cases}Voltage regulation
\text{VR}=\frac{|V_\text{NL}|-|V_\text{FL}|}{|V_\text{FL}|}=\frac{|E_A|-|V_{1\phi,\text{rated}}|}{|V_{1\phi,\text{rated}}|}V_\text{FL}is the full-load voltage which is the full-load/maximum rated voltage at the output terminal.- Calculate
E_Aat full load by calculating the current as shown above. V_\text{NL}is the no-load voltage, which in the no-load case will beE_A.
| No-load | Full-load |
|---|---|
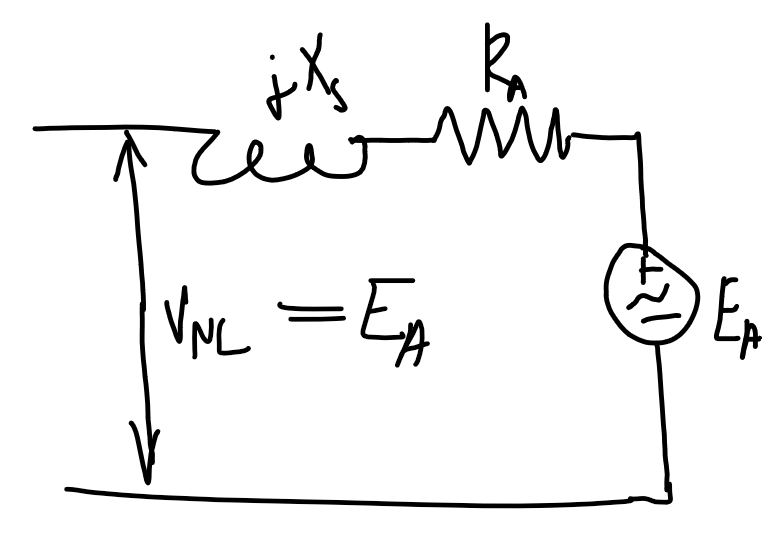 |
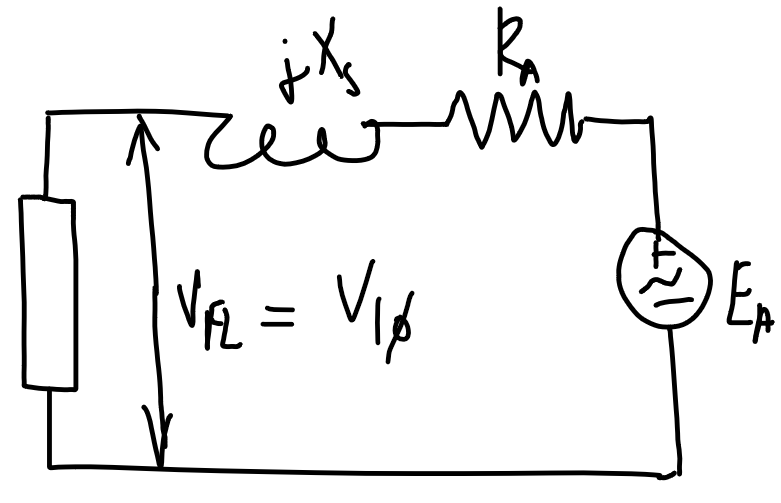 |
| Power factor | Voltage regulation |
|---|---|
| Lagging | Positive |
| Unity | Near 0 |
| Leading | Negative |
Open and short circuit test
Note - double-check if the axis refers to per-phase or line voltage/current.
| Open-circuit test | Short-circuit test |
|---|---|
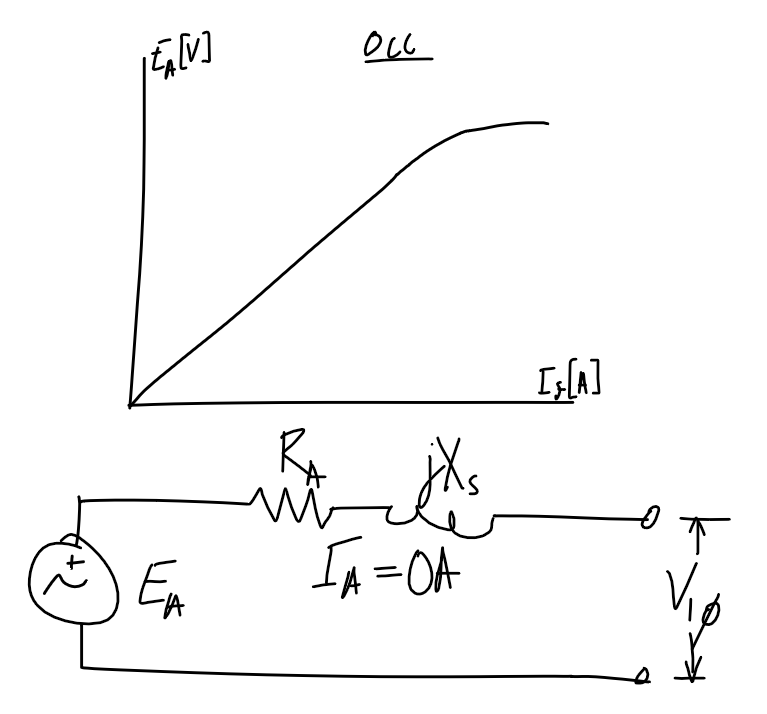 |
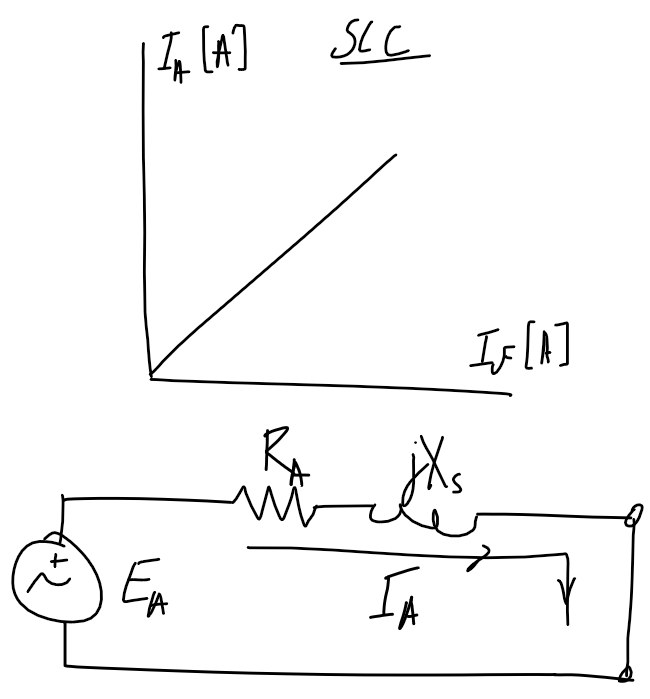 |
Power flow
P_\text{out} is the rated power
P_\text{out}=S_\text{rated}\times \text{PF}
\begin{align}
P_\text{in}&=P_\text{copper}+P_\text{core}+P_\text{F\\\&W}+P_\text{misc}+P_\text{out}\\
P_\text{mech}&=P_\text{F\\\&W}+P_\text{misc}+P_\text{out}
\end{align}
Magnetic circuit analogy
| Magnetic circuit | name | Electrical circuit | name | |
|---|---|---|---|---|
| $$\mathcal F$$ | Magnetomotive force [A-turn] | $$\mathcal E$$ | Electromotive force [V] | |
| $$\mathcal R$$ | Reluctance [1/H] | $$R$$ | Resistance [$\Omega$] | |
| $$\Phi$$ | Magnetic flux [Wb] | $$I$$ | Current [A] | |
$$\mathcal P=\frac{1}{\mathcal R} |
Permeance [H] | $$G=\frac{1}{R} |
Conductivity [$\mho$] | |
| $$\mathcal F=\Phi\mathcal R$$ | Hopkinson's law | $$V=IR$$ | Ohm's law | |
$$\mathcal R=\frac{l}{\mu A} |
$$R=\frac{l}{\sigma A} |
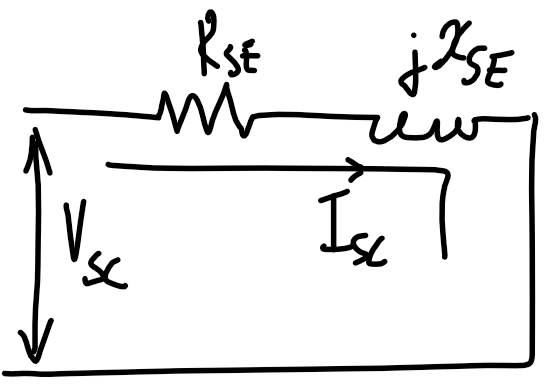
Transformers
Z_P=Z_S\left(\frac{N_P}{N_S}\right)^2=Z_S n^2Maximum power.
If load is resistive ($jX_\text{load}=0$) then for maximum power transfer:
R_\text{load}=|{R_\text{src}}^2+j{X_\text{src}}^2|Parameter identification
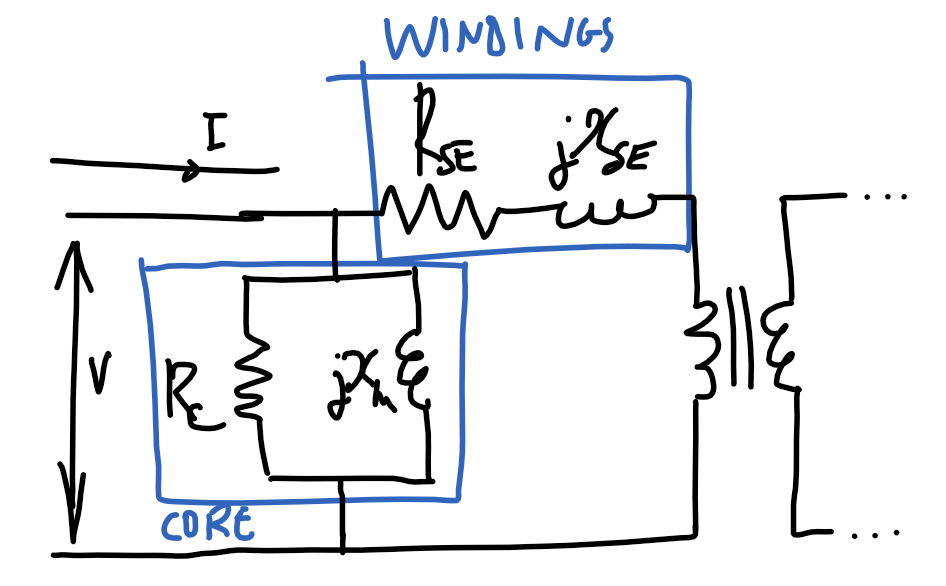
| Open-circuit test | Short-circuit test |
|---|---|
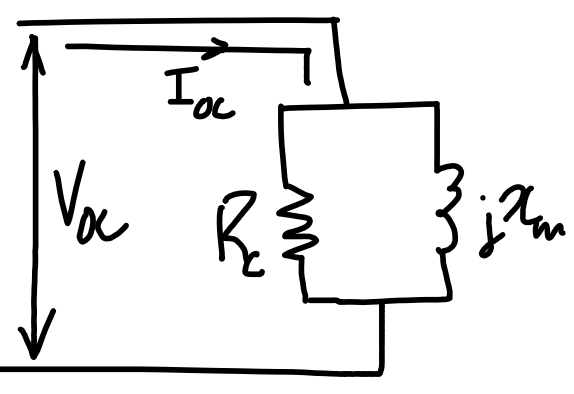 |
 |
Voltage regulation
\text{VR}=\frac{|V_\text{NL,P}|-|V_\text{rated,P}|}{|V_\text{rated,P}|}=\frac{|V_\text{in}|-|V_\text{rated,P}|}{|V_\text{rated,P}|}Ignore shunt resistance. Refer from primary side. Use KVL to determine V_\text{in}.
Voltage regulation is typically small.
|V_\text{in}|=|V_\text{rated,P}+I_\text{L,P}\cdot\bar Z|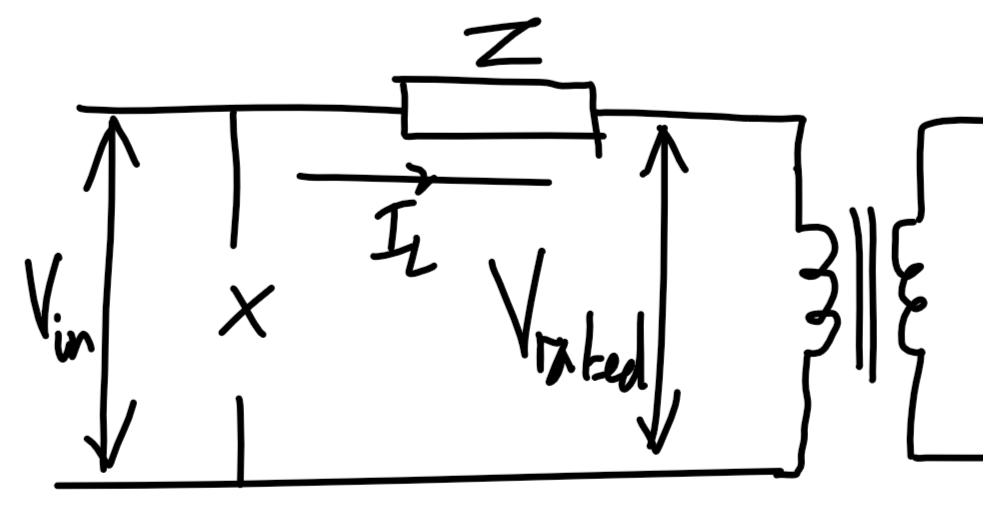
DC machine
| Separately excited machine | Shunt excited | Series excited |
|---|---|---|
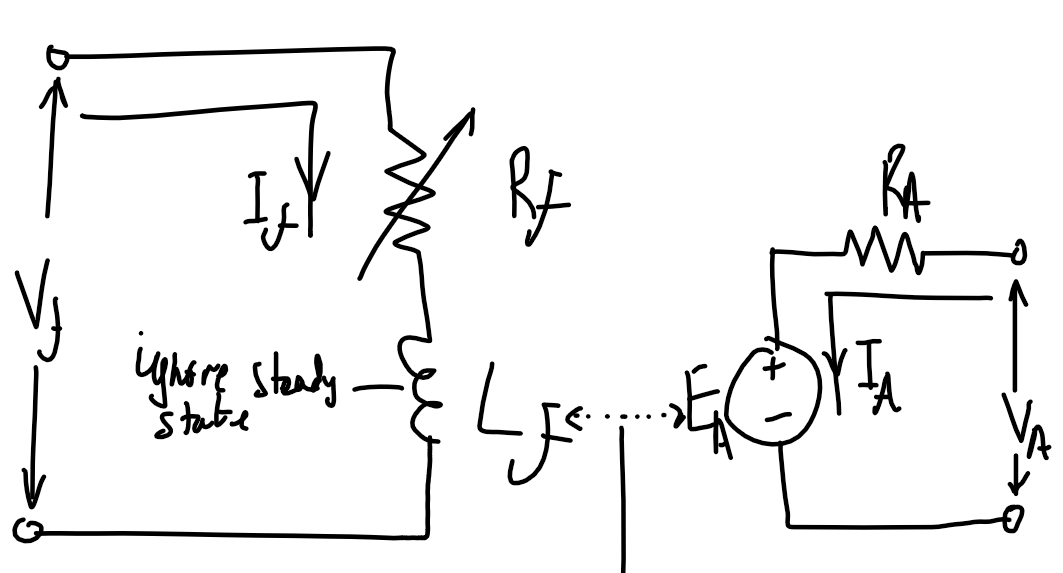 |
 |
 |
| Similar torque-speed characteristic to separately-excited machine | High torque per ampere. Used in high-torque applications | |
| Requires two independent voltage sources | Do not run unloaded - infinite speed at 0 torque as \omega\propto 1/\sqrt{\tau} |
|
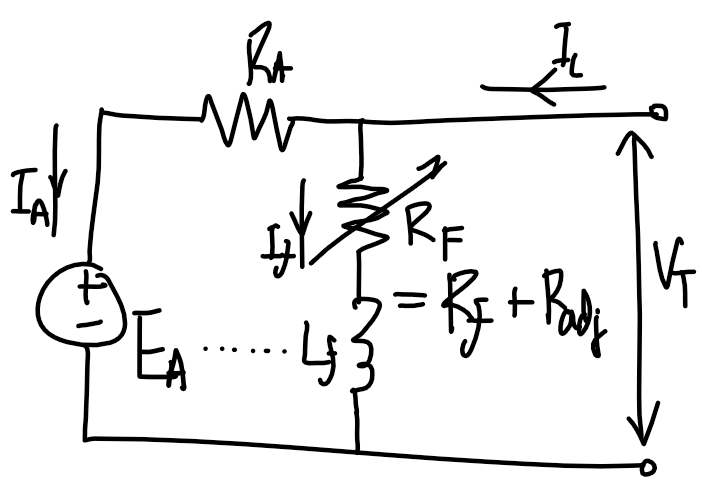
Motor control using R_f |
Motor control using R_F |
Motor control using V_T. |
Starting DC motors
R_A might need to be adjusted so it is high initially in large DC motors, as the starting current is high since there is no back-emf created by E_A.
Magnetizating curve
When a question specifies the field current or R_\text{adj}, refer to magnetization curve. Magnetizating curve is valid at a specific speed n_{m1}, and the curve is used to find E_{A1}. Using the load condition to find the armature current I_A=\tau_\text{ind}/(K\varPhi), V_A can be used to find a second induced EMF E_{A2}. Using E_{A2} find the speed n_{m2} by scaling n_{m1} by E_{A2}/E_{A1}.
Idk
P_\text{mech}=E_AI_ANo-load separately excited machine. Assuming no mechanical losses.
E_A=V_A\text{ (No load)}I_A=0\text{ (No load)}Armature reaction causes increase in speed and causes instability as the core saturates near the poles. Can be reduced with compensating winding which is in series with the armature coil.
K\Phi\omega=E_AK\Phi I_A=\tauFor shunt motor
K\Phi=\frac{V_T-R_AI_A}{\omega}\tau=K\Phi I_A=\frac{V_T-R_AI_A}{\omega}I_AAssume no saturation, speed locked(?):
This doesn't seem right. We are meant to use the machine constant and the proportionality of current to magnetic flux.
\frac{E_{A2}}{E_{A1}}=\frac{I_{f2}}{I_{f1}}